矩阵分析L2 线性映射与线性变换
一 . 线性映射和线性映射
1.定义
线性映射体现在一个向量空间中满足两个合向量的映射等于两个向量映射的和,以及数乘后的映射等于映射后的数乘
线性变换是基于线性映射的一种特例,也就是在自身空间的映射。

2.例子
- 不带乘除的变换

- 相似变换

- 微分变换和积分变换

二.同构
同构其实就是特殊化的线性映射,特殊在与其要求一一对应,分析同构要先写出对应关系p。

根据同构的思想我们可以把3D中的线性变换问题转换为坐标运算问题,可以为图形学变换提供直观的表现工具

三.线性映射
1.线性映射的矩阵表示

V(F)到W(F)的映射为V空间坐标基下的向量经过线性映射后再由W坐标基来表示,由于是V中的每一个向量由右边的一组向量基来表示,所以左边应该左乘一个线性映射矩阵,使得V中每一个向量都可由右边的向量组表示;反之,要想用W中的向量组来表示左边的每一个向量,只有将右乘映射矩阵,生成一个包含W空间所有基的向量组
注意这里是A的转置


2.线性映射的坐标计算
注意,线性映射的坐标变换是在基的映射的基础上得到的


3.例题(不同线性空间的线性映射)
注意:黄色部分为R4的基到R3的基的映射矩阵,每一列为R4中基映射到R3中基后对应的表示系数
下图为得到R4中向量到R3中向量的一般表示

下面代入具体的例子

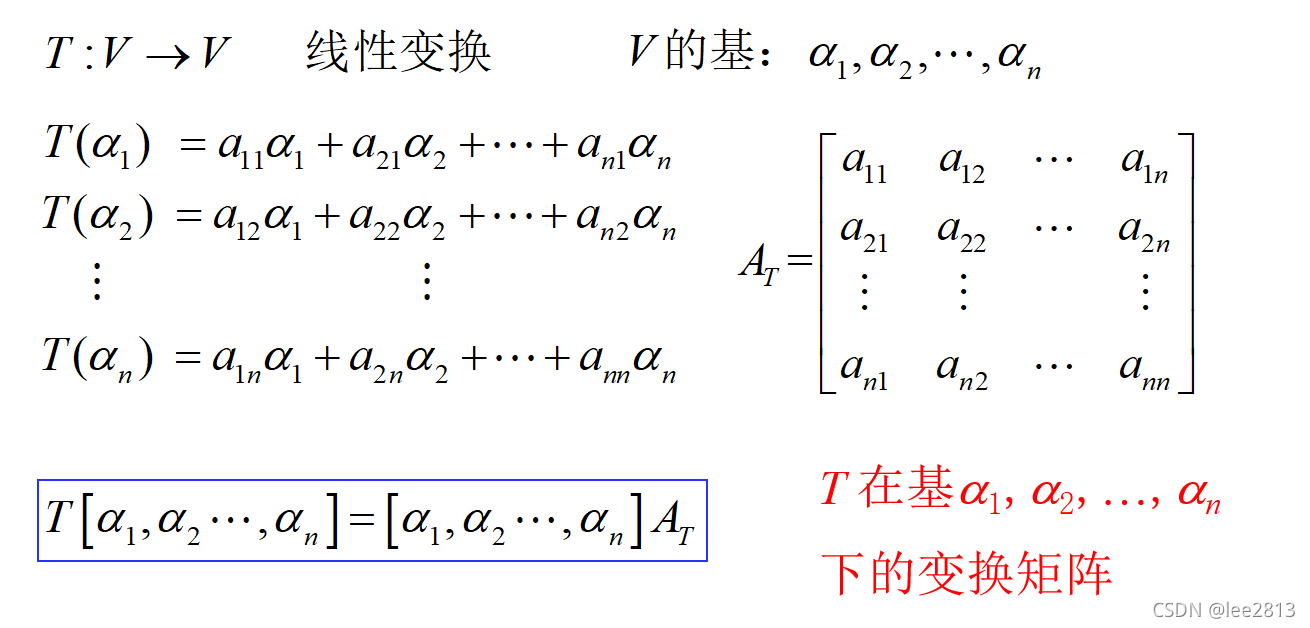
四.线性变换
1.线性变换的矩阵表示
和线性映射唯一的区别在于没有基变换。
2.例题(线性变换矩阵)
首先得到变换的像

然后得到变换矩阵

3.例题(变换矩阵)
注意与映射矩阵的区别

首先得到映射矩阵At

然后根据在基I上的变换方程再利用过渡矩阵将在基I的变换方程得到基II的上变换矩阵。
也可以理解线性映射其实有两步,第一步是变换到基II上,第二步是将映射直接在基II上进行,也就是题目描述

4.线性变换的性质

5.线性变换的运算

注意这里像和核的概念

6.例题(像和核)
也就是线性变换后得到一个新的向量组再进行相关判定


五.线性变换的特征值与特征向量
1.概念


2.线性变换的特征值与特征向量的求法

3.例题(变换矩阵的特征向量和特征值)


4.特征子空间

5.不变子空间
特征子空间是一种不变子空间

可以将一个空间分为多个不变子空间,每个不变子空间有最近的映射矩阵


如果特征子空间为一维,那么得到一个对角矩阵

